TPE de 1er S-SI 2004-2005 :
Petit pas, grand pas
Un robot qui marche Daprès Elektor
Cet article à été trouvé dans lelector n°320, Février 2005
« C'est incontestable, il ne tient pas au garde à vous tout seul, sur ses deux jambes, mais il marche vraiment et il n'a besoin pour cela que d'une poignée d'électronique et de deux servomoteurs seulement. C'est évidemment de ceux-ci que vient toute la puissance de notre robot. Ils produisent tout naturellement le déplacement souhaité, de long en large. Autre avantage appréciable: on peut piloter ces composants directement par un microcontrôleur qui renferme déjà un fameux baluchon d'électronique de commande. »
La construction mécanique est simple puisque les jambes du robot se fixent directement aux axes des servomoteurs et que la structure est un simple morceau de plaque daluminium plié.
Le microcontrôleur est un atmel, le 90S2313 il na besoin pratiquement de rien pour pouvoir commander les servomoteurs ce qui réduit lélectronique au minimum. Les deux capteurs servent à détecter les obstacles grâce a deux antennes pour que le robot fasse marche arrière.
Ce robot nest donc pas conçu ni pour sa technique de marche ni pour son esthétique. Nous lavons réalisé car il permet de toucher à pratiquement tous les thèmes abordés en section S-SI (étude des mouvements, réalisation dun circuit électrique, utilisation du logiciel Solidworks, introduction a la programmation, )
Le microcontrôleur na besoin pratiquement de rien pour pouvoir commander les servomoteurs et les leds ce qui réduit lélectronique au minimum.
Les deux capteurs servent à détecter les obstacles grâce a deux antennes pour que le robot fasse marche arrière.
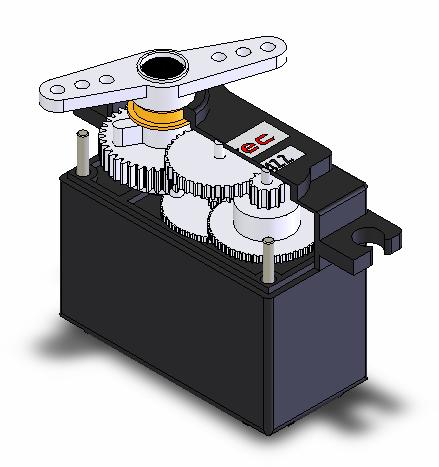
Modélisation sous Solidworks
Nous avons réalisé ce robot sous SolidWorks, logiciel de DAO utilisé par l'éducation nationale.
Un servomoteur est un moteur électrique muni d'engrenages et commandé par un circuit interne de détection de position. Outre la tension d'alimentation, on applique à un servomoteur un signal de commande qui lui indique la position à prendre. Il surveille donc lui-même son attitude et la maintient ou la modifie, selon les ordres. Cela signifie que, sans variation du signal de gouverne, le servomoteur reste immobile. Il faut une variation de ce signal pour le faire changer de position.
Le signal de commande consiste en impulsions rectangulaires de 5 V d'amplitude. Leur période est constante, c'est la largeur d'impulsion qui détermine la position de l'axe. Le neutre correspond à une largeur d'environ 1,5 ms. Selon l'angle de rotation souhaité, les impulsions seront plus brèves ou plus longues. Mais la période de 20 ms reste tout le temps identique à elle-même.

Animation du robot sous MotionWorks
Nous avons tout dabord voulu faire une animation grâce à un petit logiciel fournit avec la bibliothèque de forme de Solidworks, nous avons donc décidé de faire tourner la roue du moteur afin quelle entraîne les autres avec elle mais les ordinateurs narrivaient pas à suivre la cadence et donc le rendu été trop saccadé.
Nous avons ensuite décidé de passer sur MotionWorks qui est un module de Solidworks.
Voila la vidéo realisée ici

