PPE de Terminale S-SI 2005-2006 :
Robot Hexapode

Suite aux TPE de l'année derniere, nous avons dût réaliser des PPE (Projet Pluritechnique Encadré). Notre premiére idée a été d'améliorer le robot précèdament réalisé en lui rajoutant un suiveur de ligne ou une caméra.
Nous avons donc changé dobjectif, et nous avons décidé de construire un nouveau robot. Ce dernier devrait être plus stable et plus solide que lancien. La solution trouvée fut lhexapode, un robot avec six pattes comme les fourmis ou les scarabées. Bien que le nombre de servomoteurs était un problème au départ nous avons étudié les différents modèles possibles et nous avons opté pour une solution avec trois servomoteurs (un pour deux pattes).
Voici les differents modéles que nous avons trouvé :

Ici une vidéo d'un robot hexapode de dernier cri : RiSE.wmv
Et voici le modéle que nous avons prit :

Une vidéo du modele retenu : lynxmotion.mpg
La marche hexapode
Pour un robot hexapode, la marche la plus courante est le tripode alterné. Il va se déplacer en soulevant 3 pattes à la fois, cest à dire les deux extrêmes d'un côté et la patte centrale du côté opposé. Puis il recommence en alternant les 3 pattes, et ainsi de suite....
Sur les figures, les couleurs pleines représentent les pattes au sol et les couleurs hachurées symbolisent les pattes en l'air.


Avec ceci nous avons put créer un tableau de transition qui nous a aidé dans la programmation
Tableau sous EXEL : Tableau de transition des mouvement.xls
Puis nous avons put fair le grafcet correspondant
Grafcet : grafcet.pdf
Etude des dimensions
A partir dimages trouvées sur le site de lynxmotion, nous avons réalisé le robot avec le logiciel de 3D, Solidworks sans connaître les dimensions réelles du modèle ni ses proportions.
Les cotes pifometrique



Le Robot en 3D sous Solidworks

Une vidéo de la réalisation sous MotionWorks pour le calcul des pattes centrales motionworkspattemilieu.avi
Conception du robot
Nous avons tout dabord pré-usiné (coupe en gros) les différentes pièces du robot grâce à une scie à bande et aux documents créés sous SolidWorks pour lébauche.


Puis nous avons utilisé une fraiseuse manuelle à trois axes. Les pages ci-dessous montrent les brouillons de méthodes pour lusinage.




Montage du robot






Partie électronique
Cette partie ce resume en trois grandes parties, l'interface entre le pic et les servomoteurs, la partie caméra et émetteur et la partie ajouté aprés de la télécommande.
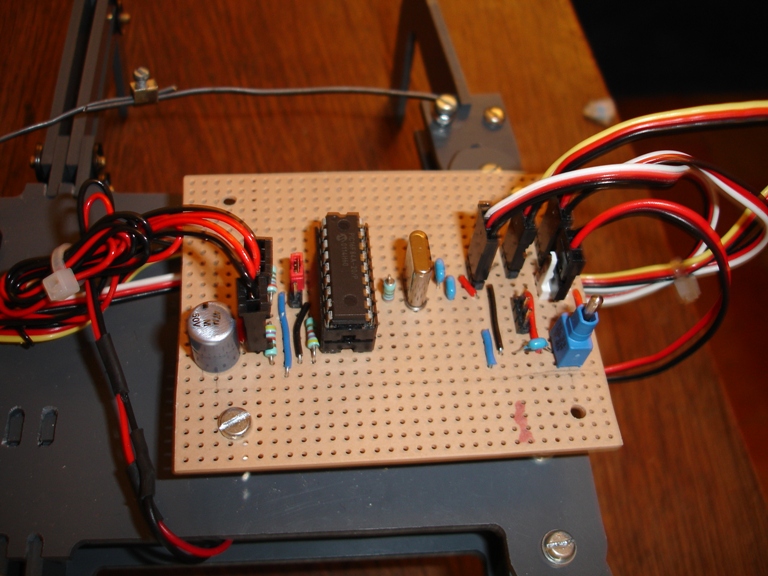




Voici les schéma correspondants
La partie commande des servomotteurs

La partie reception et decodage pour la telecommande

Le schéma de la télécommande

Le schéma de l'émetteur video

Programmation
Code source en ASM sans la gestion de la télécommande : Hexapode sans telec.asm
Code source en ASM avec la gestion de la télécommande : Hexapode avec telec.asm
Organigrammes et differents test ASM : ici
Test final
Voila la première vidéo realisée test1.mpg
Voila la deuxième vidéo realisée test2.MOV
Voila la troisième vidéo realisée test3.mpg

